
1. Äntwert op d'Exekutivresumé
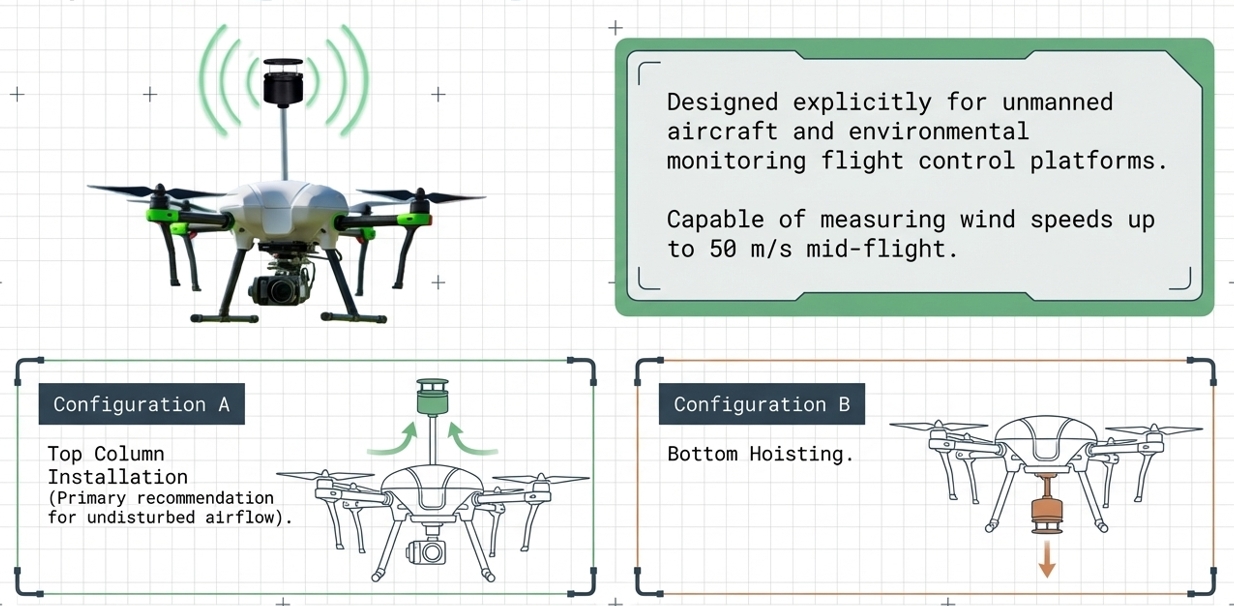
Zu de wesentleche Viraussetzunge fir e meteorologescht Instrument, dat op enger UAV montéiert ass, gehéieren en ultraleichten Design (ënner 60 g) an eng integréiert Struktur ouni bewegend Deeler, fir aerodynamesch Stabilitéit a Haltbarkeet ze garantéieren. Ideal Sensore mussen en héije Widderstand géint elektromagnetesch Stéierungen ubidden a Standardprotokoller wéi Modbus RTU fir eng nahtlos Integratioun vun der Fluchsteierung ënnerstëtzen. Dës technesch Architektur erméiglecht eng Echtzäit-Iwwerwaachung vu fënnef Schlëssel-Ëmweltelementer - Wandgeschwindegkeet, Richtung, Temperatur, Fiichtegkeet an Drock - ouni d'Fluchdauer vu modernen Drohnenplattformen ze kompromittéieren.
2. Aféierung: Déi entscheedend Roll vun der Echtzäitmeteorologie bei Drohnenoperatiounen
An der héichrisikovoller Welt vun den onbemannte Loftfaartgefierer (UAV) sinn Echtzäit-meteorologesch Donnéeën den Ënnerscheed tëscht enger erfollegräicher Missioun an engem katastrophale Frame-Verloscht. D'Miessung vu Wandgeschwindegkeet, Richtung, Temperatur, Fiichtegkeet an Atmosphärendrock während dem Fluch ass net méi eng optional "Extra" - et ass eng Kärfuerderung fir Fluchstabilitéit, Batterieoptimiséierung a Präzisioun vun der Notzlaascht.
Bei Honde Technology hu mir eis Sensorléisungen entwéckelt fir déi primär Hürden vun Drohnen-montéierter Hardware ze iwwerwannen: Gewiichtsnodeeler, héije Wandwiderstand a Signalverschlechterung. Indem mir mechanesch Komponenten zugonschte vun engem integréierten, solid-state-Design eliminéieren, adresséiere mir déi spezifesch Erausfuerderunge vun héijer elektromagnetescher Stéierung (EMI), déi typesch fir bürstenlos Gläichstroummotorumgebungen (BLDC) sinn, a setzen en neie Standard fir autoritär, fléifäeg Ëmweltdaten.
3. Schlësselparameter: Firwat "Liicht" a "Kleng" net verhandelbar sinn
Fir Drohnen-Systemingenieuren ass all Gramm, deen dem Fligerzell bäigefüügt gëtt, eng direkt Belaaschtung fir d'Fluchausdauer a Manövrierbarkeet. Historesch huet d'Integratioun vun engem komplette meteorologesche Suite dacks den Opschwong op eng méi grouss, méi deier Drohnenklass bedeit. Den Honde Drohnen-Wiederinstrument stéiert dësen Ofwägung. Mat engem Duerchmiesser vu just 50 mm an engem Gesamtgewiicht vu 55-56 g gëllt et als ee vun de liichtsten a klengsten Instrumenter um Weltmaart.
Kärvirdeeler vun der Integratioun vun der Drohnenfluchkontrolle:
- Niddreg Energieverbrauch:Mat engem internen Chip mat nidderegem Stroumverbrauch verbraucht de Sensor nëmmen 10mA an engem Beräich vu 5-12V, wouduerch d'Ressourcen vun der Stroumverdeelungskaart (PDB) vum Fliger gespuert ginn.
- Integréiert Dräi-Sond Ultraschallstruktur:Wéi an eisem spezialiséierten Design ze gesinn ass, eliminéiert d'Ultraschallarchitektur mat dräi Sonden bewegend Deeler, sou datt d'Eenheet immun géint déi héichfrequent Schwéngungen vum Fluch ass.
- EMI-Resistenz:Speziell entwéckelt fir d'Datenintegritéit ze erhalen trotz dem bedeitende elektromagnetesche Kaméidi, deen duerch héichleistungs Drohnenmotoren a Radiotelemetrie generéiert gëtt.
- Ëmweltresilienz:Dat IP-bewäert waasserdicht a staubdicht Gehäuse huet eng speziell Wärmeisolatiounsbehandlung um Schutzdeckel, wat eng konsequent Leeschtung bei extremen Temperaturen a liichtem Reen erméiglecht.
4. Vergläichend technesch Spezifikatiounen
Déi folgend Parameteren representéieren d'Fënnef-Elementer-Fäegkeet vum Honde-Instrument, dat fir eng séier Veraarbechtung duerch Fluchsteierungslogik an KI-gedriwwen Iwwerwaachungssystemer strukturéiert ass.
| Parameternumm | Miessberäich | Genauegkeet | Opléisung | Eenheet |
| Wandgeschwindegkeet | 0~50m/s | ±0,5 m/s (@10 m/s) | 0,01 | m/s |
| Wandrichtung | 0-359° | ±5° (@10m/s) | 0,1 | ° |
| Temperatur | -20-85℃ | ±0,3℃ (@25℃) | 0,01 | ℃ |
| Fiichtegkeet | 0-100% Loftfiichtegkeet | ±3%RH (<80%RH) | 0,01 | %RH |
| Loftdrock | 500-1100 hPa | ±0,5 hPa | 0,1 | hPa |
| Inputspannung | 5-12V | — | — | VDC |
| Aktuell | 10mA | — | — | mA |
5. Integratioun a Kommunikatioun: Modbus RTU fir Smart Flight notzen
D'Integratioun fir den modernen UAV-Ingenieur baséiert op der digitaler RS485-Interface an der Flexibilitéit vu Modbus RTU- an ASCII-Protokoller.
Technesch Déifgrënnung: Registermapping a FormelenFir hexadezimal Sensorausgab an aktionsfäeg Fluchdaten ëmzewandelen, mussen d'Entwéckler déi richteg Skalierungsfaktoren uwenden. No menger Erfahrung ass den Lofttemperaturregister am wichtegsten fir korrekt ze kartéieren:
- 0×0009: Lofttemperatur
- Formel:
Resultat = (Hex / 100) - 40 - Beispill:0x1B00 (6912) berechent sech op 29,12℃.
- Formel:
- 0x000A: Loftfiichtegkeet
- Formel:
Resultat = Hex / 100(z.B. 0×1603 = 56,35%RH).
- Formel:
- 0x000B: Atmosphärendrock
- Formel:
Resultat = Hex / 10(z.B. 0×2784 = 1011,6 hPa).
- Formel:
- 0x000C: Wandgeschwindegkeet
- Formel:
Resultat = Hex / 100(z.B. 0×0125 = 2,93 m/s).
- Formel:
- 0x000D: Wandrichtung
- Formel:
Resultat = Hex / 10(z.B., 0x0C14 = 309,2°).
- Formel:
Fortgeschratt Konfiguratioun: Den elektronesche KompassFir Drohnen, wou de Sensor net kierperlech mat der richteger Nordrichtung vun der Dron ausgeriicht ass, ënnerstëtzt de Sensor en optionalen ...Elektronesche Kompass (0×0020)Dëst erlaabt dem System, eng Richtung relativ zu engem personaliséierten Norden auszeginn, wat entscheedend fir dynamesch Upassunge vun der Fluchbunn ass.
Montageoptiounen
- Vertikal iewescht Sailinstallatioun:Recommandéiert fir d'Proufentnahme vu propperer Loft iwwer dem Propellerwäschmaschin (mat Hëllef vum vertikale Mast, deen an eise technesche Biller gewisen ass).
- Ënnenhiewen:Ideal fir schwéier Lastplattforme, wou de Sensor als eng ugebonnen oder ënnergehängt Ëmweltsonde déngt.
6. Best Practices am Ingenieurswiesen: Vermeiden vun heefege Fallen
No menger Erfahrung mat der Konfiguratioun vun dëse Flight Stacks fir B2B industriell Clienten, kënnen e puer subtil Protokolldetailer d'Zouverlässegkeet vun engem System maachen oder briechen:
- Respektéiert den 1S Query Cycle:Déi intern Veraarbechtung brauch Zäit fir fënnef Datenpunkten ze stabiliséieren. Mir hunn festgestallt, datt d'Ignoréiere vum minimale 1S/Zäit-Afrozyklus an Ärer Hostsoftware zu onstabilen Datenstréim an Buffer-Iwwerlaaf féiert.
- Stille Feelerbehandlung:Dëst ass e wichtegen "Insider"-Tipp: de Sensorgëtt kee Feelercode zréckop CRC16-Feeler oder falsch Befeeler iwwerpréiwen. Wann Äre System bannent keng Äntwert kritt200ms, musst Dir Ären Treiber programméieren, fir de Kommando automatesch nei ze schécken.
- Grenzkontrollen fir d'Registréierung:Vergewëssert Iech, datt Är Polling-Kommandoen keng Registeradressen ausserhalb vum spezifizéierte Beräich ufroen. D'Ausgab vum Sensor gëtt onberechenbar, wann no net existente Registere gefrot gëtt.
7. Schlussfolgerung & kommerziellen Opruff zur Handlung
Den HondWiederinstrument op enger Drohn montéiertbitt eng ëmfaassend meteorologesch Suite mat fënnef Elementer an engem eenzege 56g Pak. Duerch d'Optimiséierung fir niddreg Energieversuergung an héijen EMI-Resistenz liwwert et déi "Ground Truth"-Donnéeën, déi fir Präzisiounsdroonoperatiounen erfuerderlech sinn, ouni déi aerodynamesch oder Gewiichtsnodeeler vun aler Ausrüstung.


- Frot e personaliséierten Devis fir Äert Ëmweltiwwerwaachungsprojet un.
Firmennumm:Honde Technology Co., Ltd.Websäit: www.hondetechco.com E-Mail: info@hondetech.com
Zäitpunkt vun der Verëffentlechung: 08. Abrëll 2026